
Բովանդակություն:
- Հեղինակ John Day day@howwhatproduce.com.
- Public 2024-01-30 09:48.
- Վերջին փոփոխված 2025-01-23 14:48.

Որոշ ժամանակ առաջ ես տեղադրեցի իմ Wifi PPM վերահսկիչը: Այն բավականին լավ է աշխատում: Պարզապես տեսականին մի փոքր կարճ է: Ես գտա այս խնդրի լուծումը: ESP8266- ն աջակցում է ռեժիմ, որը կոչվում է ESPNOW: Այս ռեժիմը շատ ավելի ցածր մակարդակ է: Դա այնքան էլ հեշտ չի կորցնում կապը, և եթե այն կորցնում է կապը, անմիջապես նորից միանում է:
Ես օգտագործում եմ երեք ESP8266: Մեկը ESPNOW ընդունիչն է, մյուսը `ESPNOW ուղարկողը, իսկ երրորդը` մուտքի կետը, որին կարող եք միանալ: Երրորդը անհրաժեշտ է, քանի որ ESPNOW ուղարկողը չի կարող միաժամանակ մուտքի կետ լինել: Ես նաև ավելացրել եմ որոշ ալեհավաքներ `ավելի լավ տիրույթ ստանալու համար:
Կա երկրորդ մուտքի կետը անմիջապես ստացողի մոտ: Եթե դուք միանաք դրան, դուք կունենաք նույնը, ինչ հին WifiPPM նախագծի դեպքում:
Ես նաև ավելացրեցի աջակցություն MSP արձանագրության ընդունիչին: Սա «MultiWii սերիական արձանագրություն» է, որին աջակցում են MultiWii, Betaflight, Cleanflight և բազմաթիվ այլ թռիչքների վերահսկիչներ:
Քայլ 1: Մասերի ցուցակ




Ձեզ անհրաժեշտ է երեք տեսակի ESP8266 մոդուլ: Բայց դուք ցանկանում եք լավագույն տեսականին: Այսպիսով, ես առաջարկում եմ օգտագործել ESP8266 մոդուլներ ալեհավաքներով: Աշխատում է նաև առանց ալեհավաքների: Ես օգտագործում եմ հետևյալ մասերը.
2 x ESP07 (ESP8266 մոդուլ `ալեհավաքի միակցիչով)
1 x ESP12
1 x 3dBi Mini Antenne I-PEX U. FL IPX ստացողի կողքին
1 x ESP8266 2, 4 /5 ԳՀց 3dbi Wlan Wifi Antenne SMA Stecker / արական + I-PEX ադապտեր ՝ ուղարկողի կողքին
3, 3 Վ էլեկտրամատակարարում բոլոր ESP8266 մոդուլների համար
Ձեզ նույնպես պետք է Arduino IDE համակարգիչ ՝ https://www.arduino.cc/hy/Main/SoftwareESP8266 աջակցություն Arduino IDE- ի համար: Հետևեք այս ցուցումներին ՝
Քայլ 2: Ներբեռնեք և սեղմեք էսքիզները



Էսքիզները կարող եք ներբեռնել այստեղ:
Անջատեք ֆայլը: Կան երեք թղթապանակ ՝ Master-AP, Sender, Receiver
Master-AP: Դա մուտքի կետի ուրվագիծն է: Բացեք ուրվագիծը arduino IDE- ով: Գործիքների ցանկում սահմանեք պրոցեսորի հաճախականությունը 160 ՄՀց և վերբեռնեք ուրվագիծը ESP12- ում:
Ուղարկող. Դա MSPNOW ուղարկողի ուրվագիծն է: Պրոցեսորի հաճախականությունը սահմանեք 160 ՄՀց և վերբեռնեք այն ESP07 մեկից:
Դուք կարող եք տեսնել առաջին նկարում, թե ինչպես կարելի է միացնել ESP8266 մոդուլը `ջրամեկուսացման համար:
Այժմ միացրեք ESP12 (Մուտքի կետ) և Ուղարկողի ESP07 սերիական նավահանգիստներն ու հոսանքի միացումները (երկրորդ նկարը). ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Սկսեք երկու մոդուլը և միացեք «Long-Range-WifiPPM/MSP» մուտքի կետին: Գաղտնաբառը «WifiPPM/MSP» է
Բացեք դիտարկիչը և բացեք IP հասցեն 192.168.4.1: Կառավարման կայքը կհայտնվի: Կտտացրեք «Wifi Info» կոճակին: Հաղորդագրության տուփ կհայտնվի ուղարկողի MAC- ով և ստացողի MAC- ով:
Բացեք ստացողի ուրվագիծը Arduino IDE- ում: Փոխել «uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6} տողը; (երրորդ նկարը) ուղարկողի Mac հասցեին, որը ցուցադրվում է կայքում: Ստացող Mac- ը պետք է լավ լինի: Համոզվեք, որ պրոցեսորի հաճախականությունը սահմանվել է 160 ՄՀց, և ուրվագիծը վերբեռնեք երկրորդ ESP05- ում:
Քայլ 3. Ստացողը միացրեք Flight Controller- ին և կարգավորեք Cleanflight- ը



Այժմ միացրեք ընդունիչը թռիչքի վերահսկիչին: Ձեր թռիչքի վերահսկիչը պետք է ունենա 3, 3 վոլտ ելք `առնվազն 200 մԱ: Եթե ոչ, ձեզ անհրաժեշտ է լրացուցիչ 3, 3 Վ լարման կարգավորիչ:
Միացրեք ESP- ի GND- ը թռիչքի վերահսկիչի GND- ին: Միացրեք ESP- ի VCC- ն թռիչքի վերահսկիչի 3, 3 Վ կամ լրացուցիչ 3, 3 Վ լարման կարգավորիչին:
Դուք կարող եք օգտագործել PPM ելքը կամ սերիական MSP ելքը:
MSP ելքի համար միացրեք ESP8266- ի TX- ը ձեր թռիչքի վերահսկիչի ցանկացած սերիական նավահանգստի RX- ին: (Նկար 1)
PPM ելքի համար միացրեք ESP8266- ի GPIO5- ը թռիչքի վերահսկիչի PPM մուտքին: (Նկար 1)
ESP- ի միացումից հետո միացրեք թռիչքի վերահսկիչը և բացեք մաքուր թռիչքը: Ձեր բջջային հեռախոսի հետ միացեք «WifiPPM/MSP» մուտքի կետին: Գաղտնաբառը «WifiPPM/MSP» է
MSP- ի համար. Բացեք նավահանգիստների ներդիրը և MSP- ը դրեք սերիական նավահանգստում, որը միացրել եք ESP8266- ը (Նկար 2): Պահպանեք և վերագործարկեք: Գնացեք կազմաձևման ներդիր և ստացողը սահմանեք «MSP սերիական ընդունիչ» (Նկար 3): Պահպանեք և վերագործարկեք:
PPM- ի համար. Կարդացեք ձեր թռիչքի վերահսկիչի ձեռնարկում, թե ինչպես տեղադրել PPMGo- ն կազմաձևման ներդիրին և ստացողը սահմանել «PPM ընդունիչ» (Նկար 4): Պահպանեք և վերագործարկեք:
Հաջորդ կարգավորումը երկու ստացողների համար նույնն է. Գնացեք ստացողի ներդիր: Ալիքները սահմանեք «RTAE1234» (նկ. 5/տեսանյութ): Պահեք կարգավորումը:
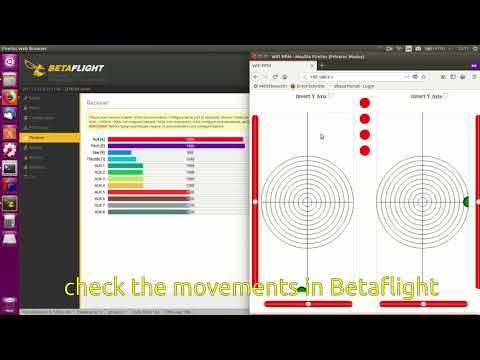
Այժմ բացեք զննարկիչը ձեր սմարթֆոնի մոտ: Բացեք կայքը 192.168.4.1 (Նկար 6): Այժմ կարող եք ստուգել վերահսկիչը:
Եթե այն աշխատում է, գործարկեք երկու ուղարկող ESP8266- ը: Միացեք «Long Range WifiPPM/MSP» մուտքի կետին: Գաղտնաբառը «WifiPPM/MSP» է: Կրկին բացեք 192.168.4.1 կայքը: Նորից ստուգեք մաքուր թռիչքի ժամանակ, եթե այն աշխատում է:
Միացրեք ալեհավաքները ESP07 մոդուլներին:
Քայլ 4: Լրացուցիչ տեղեկություններ

Սովորական շահագործման մեջ կա երկու մուտքի կետ: «WifiPPM/MSP» մուտքի կետը նման է նախորդ WifiPPM նախագծին: Կարող եք օգտագործել այն, եթե պարզապես ցանկանում եք արագ թռիչք կատարել ՝ առանց որևէ լրացուցիչ մոդուլների միացման, երբ հեռահար կապի կարիք չունեք: Եթե միանում եք «Long Range WifiPPM/MSP» - ին, երկար հեռավորության վերահսկիչը վերահսկողություն է վերցնում:
Գուցե դուք ուզում եք իմանալ, թե որքան երկար է «երկար հեռահարությունը»: Իրականում ես իսկապես չգիտեմ: Առնվազն մի քանի հարյուր մետր է: Բայց ես մինչ այժմ չէի կարող փորձարկել այն: Իմ ամբողջական բնակարանում կապը չի խզվում:
Ես ավելացրեցի MSP հսկողությունը, քանի որ կարծում էի, որ կարող եմ հեռաչափության տվյալների հետևի ալիք ստեղծել: Բայց դա երբեք կայուն չի աշխատել: Ինչևէ, MSP արձանագրությունը ավելի ճշգրիտ է, քան ppm- ը, քանի որ այն այնքան էլ կախված չէ ժամանակից: Գուցե դա խնդիրներ է ստեղծում դանդաղ թռիչքների վերահսկիչների հետ, քանի որ սերիական նավահանգստում մեծ երթևեկություն կա: Իմ Noxe F4 թռիչքի կարգավորիչով այն աշխատում է առանց խնդիրների:
Եթե ունեք որևէ կազմաձևման խնդիր, նայեք հին WifiPPM նախագծին:
Խորհուրդ ենք տալիս:
Cast FM Radio LONG RANGE Rashpberry Pi- ով ՄԻԱՅՆ !!: 6 քայլ

Cast FM Radio LONG RANGE ՄԻԱՅՆ Rashpberry Pi- ի հետ. դուք ավելին: Այսպիսով, եկեք սկսենք: Ձեզանից շատերը մտածում են բծերի և այլ բաղադրիչների մասին, որոնք
IoT- Ubidots- ESP32+Long-Range-Wireless-Vibration-And-Temperature-Sensor: 7 քայլ

IoT- Ubidots- ESP32+Long-Range-Wireless-Vibration-And-Temperature-Sensor. Թրթռումն իսկապես շարժիչ սարքերի մեքենաների և բաղադրիչների այս կամ այն շարժում է կամ տատանում: Արդյունաբերական համակարգում թրթռումը կարող է լինել անհանգստության ախտանիշ կամ շարժառիթ, կամ կարող է կապված լինել ամենօրյա աշխատանքի հետ: Օրինակ, osci
Esp32-Ubidots-Wireless-long-range -երմաստիճանը և խոնավությունը. 6 քայլ

Esp32-Ubidots-Wireless-long-range Temperature-and-խոնավություն. Այս ձեռնարկում մենք ջերմաստիճանի և խոնավության տարբեր տվյալներ ենք չափելու ՝ օգտագործելով Temp և խոնավության տվիչ: Դուք նաև կսովորեք, թե ինչպես ուղարկել այս տվյալները Ubidots- ին: Որպեսզի կարողանաք վերլուծել այն ցանկացած վայրից ՝ տարբեր ծրագրերի համար
IoT-ThingSpeak-ESP32-Long-Range-Wireless-Vibration-And-Temp: 6 քայլ

IoT-ThingSpeak-ESP32-Long-Range-Wireless-Vibration-And-Temp. Այս նախագծում մենք կչափենք թրթռումը և ջերմաստիճանը ՝ օգտագործելով NCD թրթռման և ջերմաստիճանի տվիչներ, Esp32, ThingSpeak: Թրթռումն իսկապես շարժում է այս կամ այն կողմ-կամ տատանում: - շարժիչային սարքավորումների մեքենաների և բաղադրիչների. Թրթռում i
ThingSpeak, ESP32 և Long Range Wireless Temp and խոնավություն. 5 քայլ

ThingSpeak, ESP32 և Long Range Wireless Temp and խոնավություն. Այս ձեռնարկում մենք ջերմաստիճանի և խոնավության տարբեր տվյալներ ենք չափելու ՝ օգտագործելով Temp և խոնավության տվիչ: Դուք նաև կսովորեք, թե ինչպես ուղարկել այս տվյալները ThingSpeak- ին: Որպեսզի կարողանաք վերլուծել այն ցանկացած վայրից ՝ տարբեր ծրագրերի համար