
Բովանդակություն:
- Հեղինակ John Day day@howwhatproduce.com.
- Public 2024-01-30 09:50.
- Վերջին փոփոխված 2025-01-23 14:48.

Այս ուսանելիում ես ձեզ ցույց կտամ, թե ինչպես կարելի է վերահսկել սլաքի շարժիչի դիրքը ՝ օգտագործելով պոտենցիոմետր: Այսպիսով, եկեք սկսենք:
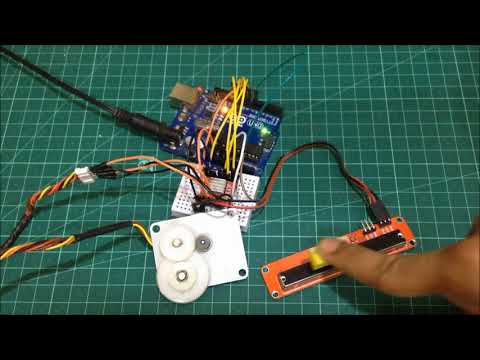
Քայլ 1: Հավաքեք մասեր:

Ահա այն, ինչ ձեզ հարկավոր կլինի.
Arduino տախտակ.
Քայլ շարժիչ
Կտրուկ շարժիչի վարորդ.
Պոտենցիոմետր
Շատ M-M jumper լարեր
Որոշ M-F jumper լարեր
12 վոլտ DC հոսանքի աղբյուր
Քայլ 2: Arduino ծածկագիրը

Նախքան էլեկտրահաղորդման միացումներ կատարելը, նախ բեռնեք կոդը Arduino տախտակին: A4988 վարորդի համար նախատեսված գրադարանը տրամադրված է: Պատճենեք այն աշխատասեղանին, բացեք Arduino IDE- ն և ներառեք ZIP գրադարանը ՝ ծածկագիրը վերբեռնելուց անցնելով «ուրվագծի» տարբերակը:
Քայլ 3: Կատարեք լարերի միացումներ:

Հետևեք սխեմայի սխեմային և միացրեք բոլոր բաղադրիչները `օգտագործելով jumper լարերը: Մի խառնեք 12 Վ լարման հոսանքի միացումներն ու շարժիչի ելքային միացումները 5 Վ լարման կամ ցանկացած թվային մուտքի հետ, այլապես դա ձեր աշխարհում միկրոկառավարիչի և շարժիչի վարորդի վերջին օրն է:
Քայլ 4: Միացրու այն:

Բոլոր էլեկտրագծերի և ստուգումների ավարտից հետո միացրեք կարգավորումը `միացնելով Arduino միկրոկառավարիչի տախտակը DC հոսանքի աղբյուրին (նախընտրելի է 9-12 վոլտ տիրույթ) և աշխատեցրեք շարժիչը:
Քայլ 5: Դիտեք, որ այն աշխատում է:
Հուսով եմ, որ ձեզ դուր կգա այս նախագիծը պատրաստել: Ուրախ կլինեմ տեսնել ձեր աշխատանքը:
Խորհուրդ ենք տալիս:
Ինչպես վերահսկել DC շարժիչը L298n- ով և Arduino- ով. 5 քայլ

Ինչպես վերահսկել DC շարժիչը L298n- ով և Arduino- ով. Բարև բոլորին: Եկեք ներկայանամ: Իմ անունը Դիմիտրիս է և ես Հունաստանից եմ: Ես շատ եմ սիրում Arduino- ն, քանի որ դա խելացի տախտակ է: Ես կփորձեմ հնարավորինս լավագույնս նկարագրել այս հրահանգը, որևէ մեկի կողմից: Այսպիսով, եկեք սկսենք
Ինչպես վերահսկել BLDC շարժիչը Arduino- ի և Joystick- ի միջոցով. 6 քայլ

Ինչպես վերահսկել BLDC շարժիչը Arduino- ի և Joystick- ի միջոցով. Բարև ընկերներ, այս ձեռնարկում ես ձեզ ցույց եմ տալիս, թե ինչպես կարելի է կառավարել Brushless dc շարժիչը, որը հայտնի է BLDC շարժիչով Arduino- ով և ջոստիկով:
Ինչպես վերահսկել սերվո շարժիչը համակարգչից GUI- ով `5 քայլ

Ինչպես վերահսկել սերվո շարժիչը համակարգչից GUI- ով. अपनी Servo շարժիչ c համակարգիչ user գրաֆիկական ինտերֆեյս (GUI) control վերահսկողության միջոցով करने Able सकते है इस ուսանելի ընթերցում अपने जिसके द्वारा आप c համակարգիչ
Ինչպես վերահսկել DC Gear շարժիչը `օգտագործելով 160A խոզանակով էլեկտրոնային արագության վերահսկիչ և սերվերի փորձարկիչ. 3 քայլ

Ինչպես վերահսկել DC Gear Motor- ը ՝ օգտագործելով 160A խոզանակով էլեկտրոնային արագության վերահսկիչ և սերվո փորձարկիչ. Տեխնիկական պայման. Լարման ՝ 2-3S Lipo կամ 6-9 NiMH Շարունակական հոսանք ՝ 35A Պայթյունի հոսանք ՝ 160A BEC ՝ 5V / 1A, գծային ռեժիմի ռեժիմներ ՝ 1: առաջ &հակադարձ; 2. առաջ &արգելակ; 3. առաջ & արգելակ & հակառակ քաշը ՝ 34 գ Չափը ՝ 42*28*17 մմ
Ինչպես վերահսկել անօդաչու թռչող սարք Quadcopter Brushless DC շարժիչը (3 լարերի տեսակը) ՝ օգտագործելով HW30A շարժիչի արագության կարգավորիչը և Arduino UNO- ն ՝ 5 քայլ
 ՝ օգտագործելով HW30A շարժիչի արագության կարգավորիչը և Arduino UNO- ն ՝ 5 քայլ")
Ինչպես վերահսկել անօդաչու թռչող սարք Quadcopter Brushless DC շարժիչը (3 լարերի տեսակը) `օգտագործելով HW30A շարժիչի արագության կարգավորիչը և Arduino UNO- ն: Նկարագրություն. HW30A շարժիչի արագության կարգավորիչը կարող է օգտագործվել 4-10 NiMH/NiCd կամ 2-3 բջջային LiPo մարտկոցներով: BEC- ը գործում է մինչև 3 LiPo բջիջով: Այն կարող է օգտագործվել Brushless DC շարժիչի արագությունը (3 լար) առավելագույնը մինչև 12Vdc: Հատուկ