")
Բովանդակություն:
- Հեղինակ John Day day@howwhatproduce.com.
- Public 2024-01-30 09:51.
- Վերջին փոփոխված 2025-01-23 14:48.

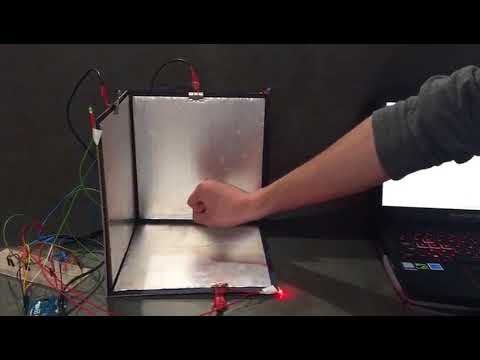

Այս հրահանգում բացատրվում է, թե ինչպես կարող է ձեռքի շարժումը հետևել 3D տարածության մեջ `կիրառելով տարողունակության զգացման սկզբունքը: Ալյումինի լիցքավորված փայլաթիթեղի և ձեր ձեռքի միջև հեռավորությունը փոխելով ՝ կոնդենսատորի հզորությունը կտարբերվի: Այս մեթոդը կարող է օգտագործվել որպես ցածրակարգ այլընտրանք իներցիոն և օպտիկական համակարգերի համար ՝ 3D տարածության մեջ շարժումը հետևելու համար: Այս նախատիպում մենք ավելացրել ենք LED- ները, որոնք կփայլեն, երբ օբյեկտը շատ մոտենա ալյումինե փայլաթիթեղի թերթին:
Քայլ 1: Պահանջվող գործիքներ և նյութեր
- 3x 270k Օմ դիմադրություն
- 3x 10k Օմ դիմադրություն
- 3x ալիգատոր սեղմիչ
- 1x կարմիր LED
- 1x Կապույտ LED
- 1x կանաչ LED
- 3x 220 Օմ դիմադրություն
- erոդող
- atերմության նվազում
- վահանի մալուխ
- Արդուինո Ունո
- Ալյումինե փայլաթիթեղ
- ստվարաթուղթ
- Կասետային
- Սփրեյ սոսինձ
- Breadboard
- Միացման լարեր (տարբեր երկարություններ)
Քայլ 2: Շրջանակի կառուցում




Կտրեք ստվարաթղթի երեք քառակուսի կտոր (250x250 մմ) և երեք քառակուսի կտոր ալյումինե փայլաթիթեղ (230x230 մմ): Կիրառեք լակի սոսինձ ալյումինե փայլաթիթեղի մի կողմում և յուրաքանչյուրը քսեք ստվարաթղթի կտորներին: Այս նախատիպում ալյումինե փայլաթիթեղի թերթերը հանդես կգան որպես մեր տարողունակ տվիչներ: Հետևաբար, համոզվեք, որ բավականաչափ տարածք կա ալյումինե փայլաթիթեղի և ստվարաթղթե եզրագծի միջև, այնպես որ շրջանակը հավաքելուց հետո փայլաթիթեղի տարբեր թերթերի միջև շփում չի լինի: Երբ փայլաթիթեղը կիրառվում է ստվարաթղթի վրա, ժամանակն է հավաքել երեք կտոր ստվարաթուղթ `ժապավենով` շրջանակն ավարտելու համար: Կրկին համոզվեք, որ ալյումինե փայլաթիթեղի տարբեր թերթերի միջև շփում չկա:
Քայլ 3. Վահանի լարերի միացում ափսեի և Արդուինոյի վրա



Նրբաթիթեղները միացմանը միացնելու համար կարևոր է օգտագործել պաշտպանված մալուխ: Սովորական մալուխների օգտագործումը կստեղծի ալեհավաքի էֆեկտ և կխոչընդոտի ձեր տվիչների ընթերցումներին: Համոզվեք, որ ունեք 3 պաշտպանված մալուխ, որոնք ունեն մոտ 50 սմ երկարություն: Վերցրեք մեկ մալուխ, հանեք մետաղալարը, կտրեք պաշտպանիչ լարերը և միացրեք այն միայն ներքին լարով ՝ այն մետաղալարով կպցնելով ալիգատորին: Համոզվեք, որ կիրառեք ջերմային նվազեցում `զոդման միացումը ծածկելու համար: Ալիգատորների սեղմակները կպցրեք ալյումինե փայլաթիթեղին:
Միացրեք վահանի բոլոր լարերը ձեր տախտակի դրական շարքին: Հետո այս դրական շարքը միացրեք ձեր Arduino- ի 5V միացմանը: Այժմ վերցրեք վահանի մալուխի հիմնական մետաղալարը և զուգահեռաբար միացրեք 10k Ohm և 220k Ohm ռեզիստորներ: Միացրեք սա ձեր Arduino- ի ելքային պորտին (մենք օգտագործում էինք 8, 9 և 10):
Կրկնեք այս քայլը ևս 2 անգամ նախատիպի մյուս հարթությունների համար:
Քայլ 4: LED- ների միացում




LED- ների ծայրերը կպցրեք երկար մետաղալարերի վրա, որպեսզի arduino տախտակից այն հասնի համապատասխան թիթեղների անկյուններին:
Մենք օգտագործել ենք 2, 3 և 4 կապում որպես մեր LED- ների ելքային կապում: Այս ելքը միացված է տախտակին և միացված է LED- ի դրական ոտքին: LED- ի բացասական ոտքը այնուհետև միացված է 330 Օմ ռեզիստորին: Ռեզիստորի մյուս ծայրը կապված է հացահատիկի գետնին, որը միացված է Arduino- ի գետնին: Կրկնեք սա բոլոր 3 LED- ների համար: Մեր նախատիպում կապույտ LED- ն միացված է Y- հարթությանը, կարմիր LED- ը Z- հարթությանը և կանաչ LED- ը X- հարթությանը: Կպցրեք LED- ները համապատասխան հարթություններին `նախատիպն օգտագործելիս անմիջական արձագանք ստանալու համար:
Եթե դուք չեք օգտագործում տախտակ և ցանկանում եք վահանի մալուխը միացնել անմիջապես Arduino- ին, կարող եք տեսնել կցված պատկերը ՝ զոդման միացումների գեղեցիկ ակնարկի համար: Ձեր վերջնական կապերը պետք է նմանվեն ընդհանուր պատկերին:
Քայլ 5: Կոդավորում
Հավելվածում մենք տեղադրել ենք այս փորձի համար օգտագործված ծածկագիրը: Լրացուցիչ պատկերացումների համար յուրաքանչյուր հիմնական հրամանից հետո տեղադրվում է մեկնաբանություն ՝ բացատրելով, թե ինչ է կատարվում ծածկագրում: Բացեք ձեր համակարգչում ձեր Arduino ծրագրաշարի կոդը և վերբեռնեք այն ձեր Arduino- ում: Եթե դուք օգտագործում եք նոութբուք, համոզվեք, որ այն լիցքավորված է. հակառակ դեպքում ձեր նախատիպը չի աշխատի:
Քայլ 6: Օգտագործելով նախատիպը
3D շարժման հետևման այս եղանակը շատ զգայուն է շրջակա փոփոխականների համար: Հետևաբար, համոզվեք, որ ճշգրտեք կոդի արժեքները ձեր սեփական իրավիճակին: Դուք կարող եք պարզապես օգտագործել սերիական մոնիտորը `ճիշտ արժեքներ ստանալու համար: Հուշում. Դուք կարող եք ինքնուրույն կառուցել ճշգրտում, որտեղ ծածկագիրը գործարկելիս վերցնում է միջին արժեքները + 10 %: Տեսանյութում ցուցադրվում է, թե ինչպես պետք է նախատիպը ճիշտ աշխատի:
Խորհուրդ ենք տալիս:
Motion Sensing Arduino Հելոուին դդում. 4 քայլ

Motion Sensing Arduino Հելոուին դդում. Այս Instructable- ի նպատակն էր ստեղծել էժան և հեշտ միջոց ՝ Հելոուինի զարդեր պատրաստելու համար տանը ՝ առանց որևէ նախնական հմտության կամ որևէ շքեղ գործիքների: Ինտերնետից հեշտությամբ աղբյուրներ աղբյուրներ օգտագործելով, դուք նույնպես կարող եք պատրաստել ձեր սեփական պարզ և անհատականացված
Leap Motion Controlled Remote Search and Disposing Robot: 5 Steps

Leap Motion Controlled Remote Search and Disposing Robot. Որպես Leap Motion #3D Jam- ի իմ մուտքի մաս, ես ոգևորված էի Raspberry Pi- ի վրա հիմնված անլար ժեստերով կառավարվող Search/Rescue Robot- ի ստեղծման համար: Այս նախագիծը ցույց է տալիս և տալիս է մինիմալիստական օրինակ, թե ինչպես է անլար 3D ձեռքի ժեստերը
DIY Smart Doorbell: Code, Setup and HA Integration: 7 Steps (With Pictures)
")
DIY Smart Doorbell: Code, Setup and HA Integration: Այս նախագծում ես ձեզ ցույց կտամ, թե ինչպես կարող եք ձեր սովորական դռան զանգը խելացի դարձնել ՝ առանց ընթացիկ գործառույթներից որևէ մեկը փոխելու կամ լարերը կտրելու: Ես կօգտագործեմ ESP8266 տախտակ, որը կոչվում է Wemos D1 mini: Նոր ESP8266- ում: Դիտեք իմ ներածությունը
Tonka Truck RC Conversion With Dump and 4WS Quad Steering: 6 Steps (With Pictures)
")
Tonka Truck RC Conversion With Dump and 4WS Quad Steering: Այո, սա արվել է նախկինում, բայց իմ կարծիքով, մնացած բոլորը դա արել են դժվարին ճանապարհով և ձախողվել են
Star Track - Arduino Powered Star Pointer and Tracker: 11 Steps (With Pictures)
")
Star Track - Arduino Powered Star Pointer and Tracker: Star track- ը Arduino- ի վրա հիմնված GoTo -mount ներշնչված աստղերի հետևման համակարգ է: Այն կարող է մատնանշել և հետևել երկնքի ցանկացած առարկայի (երկնքի կոորդինատները տրված են որպես մուտք) 2 Arduinos- ով, կինոթատրոնով, RTC մոդուլով, երկու ցածր գնով քայլող շարժիչներով և 3D տպագիր կառուցվածքով