")
Բովանդակություն:
- Հեղինակ John Day day@howwhatproduce.com.
- Public 2024-01-30 09:46.
- Վերջին փոփոխված 2025-01-23 14:48.



Fusion 360 նախագծեր »
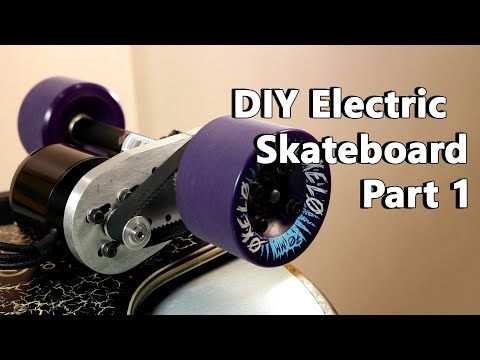
Բարև, գործընկերներ, այս ուղեցույցում ես ձեզ ցույց կտամ, թե ինչպես պատրաստել DIY էլեկտրական սքեյթբորդ ՝ համեմատաբար փոքր բյուջեով: Իմ կառուցած տախտակը կարող է զարգացնել մոտ 40 կմ/ժամ արագություն և վազել մոտ 18 կմ:
Վերևում տեսաուղեցույց է և իմ կառուցվածքի մի քանի նկար: Խնդրում եմ աջակցել իմ աշխատանքին ՝ բաժանորդագրվելով իմ YouTube ալիքին
Վերջապես, միշտ սահեք ձեր հնարավորությունների սահմաններում, անկախ նրանից, թե ինչ եք քշում, միշտ կրեք սաղավարտ և համապատասխան անվտանգության հանդերձանք:
Այսպիսով, ասվածով, եկեք սկսենք:
Պարագաներ
Ահա այն բոլոր պարագաները, որոնք ձեզ հարկավոր են էլեկտրական սքեյթբորդ կառուցելու համար
Մասեր և բաղադրիչներ
- Longboard, Skateboard
-
Վրձին Ավելի քիչ DC շարժիչ
- Սենսորային BLDC շարժիչ (սա ավելի լավն է, քան իմը)
- SensorLess BLDC շարժիչ (ավելի էժան)
-
ESC (արագության վերահսկիչ)
- Անզգայուն ESC
- Ensգայուն ESC (VESC)
-
Drive Train
- Ulախարի գոտու տարբերակ
- Chain Sprocket Version
- Շարժիչի տեղադրման հավաքածու
-
Մարտկոցներ
- 18650 բջիջ
- Լիպո բջիջներ
- Մարտկոցի պատյան
Գործիքներ և պարագաներ
- Sոդման երկաթ
- Sոդման մետաղալար
- Գործիքների տուփ
- Մետաղական ֆայլեր
- Գայլիկոն
- Հորատման բիթեր
- Պլայերներ
Քայլ 1: Ընտրելով ճիշտ չմուշկ կամ երկար տախտակ


Առաջին մարտահրավերը սքեյթբորդ գտնելն էր, որը հետագայում կարող եմ փոփոխել ՝ այն էլեկտրական դարձնելու համար: Ես կարող էի հեշտությամբ կառուցել մեկը, բայց դրա համար չունեի համապատասխան գործիքներ: Համենայն դեպս, երբ խոսքը վերաբերում է սքեյթբորդեր ընտրելուն, կան բավականին շատ ընտրություններ, ինչպիսիք են կոպեկների տախտակը, արագընթաց տախտակը, Longboard- ը և այլն:
Այստեղ լավագույն ընտրությունը, իհարկե, Longboard- ն էր, քանի որ դրանք սովորաբար ավելի լայն և երկար են: Բացի փափուկ անիվներ ունենալուց, դրանք նաև ավելի հուսալի են, ավելի հեշտ է քշել ավելի հավասարակշռված կառուցվածքի պատճառով, ինչը դրանք լավ տեղավորվում է սկսնակների համար, և մենք շատ տեղ կունենանք էլեկտրոնիկա ավելացնելու համար, հետագայում կարող եք ընտրել դրա այլ տեսակը: լավ կաշխատի, բայց հիշեք, թե որն է ձեզ ավելի հարմար և ձեռք բերեք մեկը:
Քայլ 2: Ընտրելով շարժիչներ և ESC


Այսպիսով, այստեղ սկսվում է զվարճալի մասը, Բարի գալուստ զվարճանքի, համբերության և ընտրանքների աշխարհ: Այո, ընտրանքներ: Կան բազմաթիվ տարբերակներ ՝ անկախ շարժիչներից, ESC- ներից (Արագության վերահսկիչ) կամ մարտկոցներից: Բայց ինչպե՞ս եք նեղացնում ձեր ուզածը կամ չուզածը: Ես կօգնեմ ձեզ որքան հնարավոր է:
Շարժիչ. Հիմնականում կան երկու տեսակի DC շարժիչներ, 1) խոզանակված DC շարժիչ.
2) առանց խոզանակի DC շարժիչ (BLDC).
Այն, ինչ դուք փնտրում եք, առանց խոզանակի (BLDC) առաջ շարժիչ է ՝ kv գնահատմամբ ՝ 170 -ից մինչև 300, և հզորություն ՝ 1500 -ից մինչև 3000 Վտ: Այսպիսով, մտածեք ձեր kv- ի գնահատականի մասին, թե որքան տոտիկ կունենա ձեր տախտակը, որքան ցածր է kv- ն, այնքան մեծ է ոլորող մոմենտը: Իմ շարժիչը գնահատվում է 280 կՎ և 2500 Վտ հզորությամբ, որը բավականին տավարի է և ավելի քան բավարար է 100 կգ քաշ ունեցող մարդու համար:
ESC: ESC- ն էլեկտրոնային արագության վերահսկիչ հապավում է, քանի որ BLDC- ն մի փոքր առաջընթաց է և օգտագործում է 3 փուլ `արագությունը վերահսկելու համար, ուստի ձեզ հարկավոր է արագության վերահսկիչ: ESC- ն կառուցվածքի «ուղեղն» է: Դա ձեր մարտկոցների և շարժիչի միջև կապն է: Այն միանում է նաև ձեր հեռակառավարման վահանակի ընդունիչին: ESC- ն ընդունիչից ստանում է «հրամաններ» (PWM ազդանշան), որոնք (Duty Cycle) ասում են, թե որքան է սեղմված հեռակառավարման վզիկի շնչափողը: Այնուհետև այն վերահսկում է մարտկոցից շարժիչ փոխանցվող էներգիայի քանակը ՝ հետևաբար վերահսկելով շարժիչի արագությունը:
Մեկը, որը ես օգտագործում եմ, գնահատված է 24 Վոլտ և 120 Ամպեր, այնպես որ, եթե մաթեմատիկա եք անում, այսինքն ՝ Հզորություն = Լարման * Ընթացիկ, ապա 24 * 120 = 2880 Վտ, իսկ շարժիչը գնահատվում է 2500 Վտ, այնպես որ այստեղ մենք ունենք որոշակի գլխաքանակ:
Նշում. ESC- ը ձեր էլեկտրական սքեյթբորդի կառուցվածքի մի մասն է, որը ՉԵՔ ցանկանա էժանացնել: Ավելի էժան արագության կարգավորիչը կարող է կրակ բռնել: Նաև, եթե ցանկանում եք, կարող եք օգտագործել VESC, որը ESC- ի տարբերակ է:
Քայլ 3: Կառուցեք մարտկոցի փաթեթը




Մարտկոցը որոշում է, թե որքան հեռու կարող եք գնալ: Դուք կցանկանաք մարտկոց, որը համատեղելի է ձեր շարժիչի հետ: Իմ կառուցած մարտկոցի տուփը 6S 3P 18650 Li-ion է, ինչը նշանակում է, որ ես ունեմ 6 Li-ion բջիջ ՝ շարքով, 3-ը ՝ զուգահեռ: Դա նշանակում է, որ իմ մարտկոցի լարումը 25.2 Վոլտ է (6 x 4.2):
Մարտկոցի հզորությունը չափվում է mAh- ով և դա որոշում է, թե որքան հյութ կունենա ձեր մարտկոցը: Ես ունեմ 7, 800 մԱ / ժ և դրանով դուք կարող եք որոշել, թե որքան էներգիա ունեք վտ-ժամում:
Ես շատ չեմ մանրամասնի, թե ինչպես պետք է մարտկոց կառուցել, քանի որ ես արդեն ունեմ Instructables գրառում, որը կարող եք ստուգել:
Բացի այդ, կարող եք նաև օգտագործել Li-Po 6S մարտկոցի փաթեթը, որպեսզի ստիպված չլինեք զբաղվել դրանցով, բայց ես խորհուրդ չեմ տալիս Li-Po բջիջները, քանի որ դրանք կարող են վտանգավոր լինել, եթե պատշաճ կերպով չօգտագործվեն:
Քայլ 4: ճախարակ և շարժիչ



Ulախարակ և գոտի. Այսպիսով, ձեր անիվները, շարժական ճախարը, անիվի ճախարը և գոտին բոլորը միասին պետք է տեղավորվեն այն, ինչ կոչվում է շարժիչ գնացք: Անիվի ճախարի և շարժիչի ճախարի հարաբերակցությունը կոչվում է «փոխանցման նվազեցման հարաբերակցություն»: Դուք ցանկանում եք, որ այն լինի 2,5 -ի սահմաններում, բայց կարող է իջնել 1,5 -ից կամ 3 -ից բարձր: Ընդհանրապես, նվազեցման ավելի ցածր հարաբերակցությունը ավելի լավ է, քան ցածր արագությունը: Ես օգտագործեցի 70 մմ անիվ ճախարակ, որը գալիս է հանդերձանքով ՝ 3 արագության հարաբերակցությամբ բարձր արագությունների համար:
Շարժիչային լեռ.
Դիզայնի համար ես օգտագործեցի Autodesk Fusion 360 -ը և դիզայնի մեջ որոշեցի գնալ սեղմման տեխնիկայով ՝ այն երկար տախտակի բեռնատարներին ամրացնելու համար: Ես ստեղծեցի իմ վերջնական տարբերակը, և որոշ փորձարկումների և 3D տպագրության միջոցով ես հասկացա, թե որքան կարող եմ սահել շարժիչի և բեռնատարի առանցքի միջև ՝ ապագայում գոտին սեղմելու համար:
Երբ դիզայնը պատրաստ էր, ես այն տարա մոտակա CNC արտադրամաս և այն արտադրեցի CNC- ի միջոցով: Սա արտադրական գործընթաց է, որը կիրառում է համակարգչային հսկիչներ և հաստոցներ `կտորից նյութի շերտերը հեռացնելու համար և արտադրում է հատուկ նախագծված մաս: Իմ օգտագործած նյութը Ալյումին 6061-T6 էր, քանի որ դրա հետ աշխատելը հեշտ է և բարձր ուժի բնութագրերը:
Կարող եք ներբեռնել STEP ֆայլը կամ STL ֆայլը, եթե ձեզ դուր է գալիս իմ դիզայնը ներքևից:
Քայլ 5. Drive գնացքի կառուցված գործընթացը



Սկզբում ես սկսեցի հեռացնել հետևի աջ անիվը, որպեսզի մենք կարողանանք ամրացնել մեր հենարանը և շարժիչը: Քանի որ «Սքեյթբորդի բեռնատարները» դրան մի փոքր թեքություն ունեին, ես դրանից ազատվելու համար օգտագործեցի մետաղական պատյան, այնպիսին, որ շարժիչի ամրակը հիանալի տեղավորվում էր սքեյթբորդի շերտերի վրա: Շարժիչի լեռը տեղադրելուց հետո ես շարժիչը տեղադրեցի մեքենայի պտուտակների միջոցով:
Երբ դա արվեց, ժամանակն էր ճախարակ ավելացնել մեր անիվին, որպեսզի մենք կարողանանք պտտվող էներգիան փոխանցել շարժիչից անիվ: Դա իսկապես պարզ գործընթաց է, պարզապես տեղադրեք ավելի մեծ ճախարակը անիվի հենց կենտրոնում և նշեք այն անցքերը, որտեղ մենք պետք է անիվի միջոցով փորենք: Հորատումից հետո ճախարակը անիվին ամրացնելու համար օգտագործեք մեքենայի պտուտակներ, մի մոռացեք օգտագործել թելերի կողպեքը կամ օգտագործել ինքնափակման ընկույզ մեքենայի պտուտակներով:
Այժմ ամրացրեք փոքր ճախարակն շարժիչի լիսեռի վրա և գոտին դրեք Անիվի հետ միասին և համոզվեք, որ այն պատշաճ կերպով հավասարեցված է, այնպես որ բոլոր երեքը միասին կազմում են մեր շարժիչ գնացքը:
Քայլ 6: Էլեկտրոնիկա և 3D տպագրություն



Ավտոմեքենայի գնացքն ավարտելուց հետո մենք կարող ենք մեր ESC- ն ամրացնել շարժիչին: Պարզապես միացրեք երեք մետաղալար ESC- ից Motor- ի երեք լարերին, այժմ միացրեք մարտկոցի տուփը ESC- ին և վերջապես, ժամանակն է ESC- ն միացնել ռադիոընդունիչին:
Ես որոշեցի կառուցել իմ սեփական ռադիոկառավարիչը `օգտագործելով Arduino և nRF24L01 մոդուլներ, բայց դուք կարող եք պարզապես գնել այն:, մեկը կառուցելու համար ձեզ հարկավոր կլինի
- Arduino Nano x2
- nRF24L01 մոդուլ x2
- Joystick մոդուլ x1
- 500 mAh 1S Li-Po մարտկոց x1
- TP4056 մոդուլ x1
- Անցում x1
- Խթանման մոդուլ
- 3D տպագիր պատյան (ներբեռնեք STL- ը ներքևից)
Պարզապես միացրեք Հաղորդիչն ու ընդունիչը `համաձայն այս քայլին տրված սխեմայի և վերբեռնեք կոդը (Ներբեռնեք ներքևից) երկու Arduino- ին, որից հետո միացրեք Arduino- ի 5V, GND և Digital Pin 5 համապատասխանաբար ESC- ի 5V, GND և Signal PIN- ին:.
Ստացողի թեստը կցելուց հետո, եթե շարժիչը պտտվում է ճիշտ ուղղությամբ, եթե ոչ, պարզապես երկու լարերը փոխեք շարժիչից ESC- ին, և շարժիչը կ պտտվի մեկ այլ ուղղությամբ: Այժմ մնում է միայն լրացնել էլեկտրոնիկան և մարտկոցները պատյանում: Ես ունեմ 3D տպիչ (ներբեռնեք ներքևից), այնպես որ ես պատրաստեցի հատուկ պատյան, բայց դուք կարող եք օգտագործել որոշ պլաստիկ տուփեր և տեղադրել այն երկարատախտակի ներքևում: պատրաստ է գլորվել փողոցներում:
Քայլ 7: Դուք դա արեցիք:

Դու արեցիր դա. Դուք պարզապես կառուցեցիք ձեր սեփական էլեկտրական երկարատախտակը: Համոզվեք, որ կիսվեք ձեր նկարներով ինձ հետ իմ սոցիալական լրատվամիջոցներում:
Լավ! Հիմա թվերի մասին:
Քաշը `7.2 կգ
Հեռավորությունը `7.5 սմ
Առավելագույն արագություն ՝ 40 կմ/ժ (Հնարավոր է հասնել 48 կմ/ժամ, բայց շատ անկայուն է վարել)
Cովագնացության արագություն ՝ 25 կմ/ժամ
Շառավիղը ՝ 18 Կիլոմետր
Մարտկոցներ ՝ 6S 3P Li-ion (25.2V 7800mAh)
Այսպիսով, դա գրեթե այս ձեռնարկի տղաների համար է: Եթե ձեզ դուր է գալիս իմ աշխատանքը, դիտեք իմ YouTube ալիքը ավելի հիանալի նյութերի համար.
Կարող եք նաև հետևել ինձ Facebook- ում, Twitter- ում և այլն առաջիկա ծրագրերի համար
www.facebook.com/NematicsLab/
www.instagram.com/NematicsLab/
twitter.com/NematicsLab
Խորհուրդ ենք տալիս:
Longboard Underglow: 5 քայլ (նկարներով)
")
Longboard Underglow: Ներածություն: Հավանաբար, ձեզ վիճակված էր երկարատև տախտակը դարձնել հիվանդ տեսք: Հավանաբար կարանտինում ձեզ հոգնել էին: Ինչ էլ որ լինի պատճառը, ձեր լուսատախտակին դնելը հիանալի միջոց է այն հանելու համար: Ես պատրաստել եմ WS2812 LED ժապավեն c
Insane Electric Longboard Budet Carbon Fiber Deck- ով ՝ 6 քայլ (նկարներով)
")
Insane Electric Longboard Budet With Carbon Fiber Deck. Հեյ, նախքան իմ մասին խոսելը և ինչու որոշեցի գնալ այս ճամփորդության, ես կցանկանայի ասել, որ խնդրում եմ դիտեք իմ վիդեոն էպիկական ձիավարման մոնտաժի համար և կարևորը պատրաստելու իմ փորձը: իսկապես կօգնի իմ քոլեջի դասընթացին, քանի որ
Survival Electric Coil USB վերալիցքավորվող կրակայրիչ հին PowerBank- ից ՝ 7 քայլ (նկարներով)
")
Survival Electric Coil USB վերալիցքավորվող կրակայրիչ հին PowerBank- ից. Բարև, մարդիկ, ես կառուցել եմ Survival Electric Coil USB լիցքավորիչ կրակայրիչ հին Powerbank- ից, որն ըստ էության կարող է օգտագործվել փորձերի և փոքր սաթի ստեղծման համար, որը հետագայում կարող է օգտագործվել բնության մեջ կրակ ստեղծելու համար: կամ ձեր տան շուրջը ՝ առանց որևէ
Diy Electric Skateboard: 14 քայլ (նկարներով)
")
Diy Electric Skateboard. 2 տարվա հետազոտություններից հետո ես կառուցեցի իմ առաջին էլեկտրական սքեյթբորդը: Քանի որ ես տեսել եմ, թե ինչպես կարելի է կառուցել ձեր սեփական էլեկտրական սքեյթբորդը, ես սիրահարվել եմ DIY էլեկտրական սքեյթբորդերին: Ձեր սեփական էլեկտրական սքեյթբորդ պատրաստելը մի ձև է
Electric Penny Board V1: 8 քայլ (նկարներով)
")
Electric Penny Board V1. Այս էլեկտրական կոպեկի տախտակը նախատիպ է փչացող սքեյթբորդի համար