")
Բովանդակություն:
- Քայլ 1: Ինչպես է գործում դոզան
- Քայլ 2: Սկսելուց առաջ նշեք
- Քայլ 3: Հավաքեք ամբողջ նյութը
- Քայլ 4: Տարբերակների չափսեր
- Քայլ 5: Մարմնի պատրաստում
- Քայլ 6. Գործարկիչի հավաքում և ափսեի պատրաստում
- Քայլ 7: Ալիքի բնութագրերի մշակում
- Քայլ 8. Էլեկտրոնային միացումներ և ծրագիր
- Քայլ 9. Գործարկիչների վերահսկում մենյուի վրա հիմնված ծրագրի միջոցով
- Քայլ 10: Ինչպես գործել ալիքի բաք
- Հեղինակ John Day day@howwhatproduce.com.
- Public 2024-01-30 09:49.
- Վերջին փոփոխված 2025-01-23 14:48.



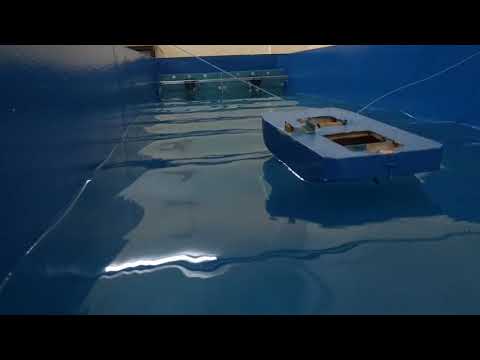
Ալիքային բաքը լաբորատոր սարք է մակերեսային ալիքների վարքագիծը դիտարկելու համար: Տիպիկ ալիքային տանկը հեղուկ, սովորաբար ջրով լցված տուփ է, որը թողնում է բաց կամ օդով լցված տարածք վերևում: Տանկի մի ծայրում շարժիչն առաջացնում է ալիքներ. մյուս ծայրը սովորաբար ալիք կլանող մակերես ունի:
Սովորաբար այդ տանկերը մեծ գումարներ են պահանջում, ուստի ես փորձեցի իսկապես էժան լուծում տալ այն ուսանողների համար, ովքեր ցանկանում են տանկն օգտագործել իրենց նախագծերը փորձարկելու համար:
Քայլ 1: Ինչպես է գործում դոզան
Այսպիսով, նախագիծը բաղկացած է երկու շարժիչներից, որոնք պատրաստված են v- անցքի ալյումինե արտամղման միջոցով:
Յուրաքանչյուր շարժիչին միացված է տափաստանային շարժիչ, և երկու շարժիչներն էլ կառավարվում են միևնույն սլաքային շարժիչով, որպեսզի հետաձգում չլինի:
Շարժիչի վարորդը կառավարելու համար օգտագործվում է Arduino- ն: Menuաշացանկով կառավարվող ծրագիրն օգտագործվում է համակարգչի միջոցով միացված հոսքին մուտքագրելու համար: Գործարկիչ թիթեղները տեղադրված են v- անցքի հենակետի վրա, որը շարժվում է շարժվելուց հետո, իսկ թիթեղների այս առաջ և առաջ շարժումը առաջացնում է տանկի ներսում ալիքներ: Ալիքի բարձրությունը և ալիքի երկարությունը կարող են փոխվել ՝ փոխելով արագությունը շարժիչ arduino- ի միջոցով:
Քայլ 2: Սկսելուց առաջ նշեք

Ես չեմ լուսաբանել փոքր բաների մեծ մասը, թե ինչպես օգտագործել arduino- ն կամ ինչպես անել եռակցումը, որպեսզի այս ձեռնարկը փոքր լինի և հասկանալի: Բաց թողնված բաների մեծ մասը կջնջվի նկարներում և տեսանյութերում: Խնդրում ենք հաղորդագրություն ուղարկել ինձ, եթե նախագծի հետ կապված որևէ խնդիր կամ հարց կա:
Քայլ 3: Հավաքեք ամբողջ նյութը
- Arduino միկրո կոնտոլեր
- 2*stepper շարժիչ (2.8 կգ սմ ոլորող մոմենտ մեկ շարժիչի համար)
- 1*Stepper շարժիչի վարորդ
- 2*V անցք հենակետային համակարգ
- Պողպատե կամ երկաթյա թիթեղներ տանկի մարմնի համար
- L- կարծրացուցիչներ `մարմնի ամրացման համար
- Օպտիկամանրաթելային կամ պլաստմասե թերթ `շարժիչ ափսե պատրաստելու համար
- Լարեր 48 վոլտ DC սնուցման աղբյուր
Ես v-slot gantry- ի համար նյութեր չեմ ներառել, քանի որ ցուցակը շատ մեծ կլինի, այնուհետև google v-slot- ում դուք կստանաք բազմաթիվ տեսանյութեր, թե ինչպես հավաքել այն, ես օգտագործել եմ 2040 ալյումինե արտամղում: Շարժիչի հզորությունը և էներգիայի մատակարարման հզորությունը կփոխվեն, եթե ցանկանում եք ավելի շատ բեռ տեղափոխել:
Տանկի չափսերը
Երկարությունը 5,50 մ
Լայնությունը ՝ 1.07 մ
Խորությունը 0,50 մ
Քայլ 4: Տարբերակների չափսեր



Ամեն ինչ ավելի պարզ և դյուրին դարձնելու համար ես տարբեր մասերի պատկերներ եմ վերցրել մասշտաբով, որպեսզի տեսնեք դրանց չափերը:
Քայլ 5: Մարմնի պատրաստում




Մարմինը պատրաստված է 3 մմ հաստությամբ թուջե թերթից:
Տանկի լայնությունը 1.10 մետր է, երկարությունը ՝ 5 մետր, իսկ բարձրությունը ՝ 0.5 մետր:
Տանկի մարմինը կազմված է մեղմ պողպատից, որտեղ անհրաժեշտության դեպքում ամրացվում են ամրացնողները: Մեղմ պողպատե թիթեղները թեքվել և կտրվել են տարբեր հատվածների ՝ ըստ բաքի չափսերի: Այս հատվածներն այնուհետև տեղադրվեցին ՝ դրանք եռակցելով: Կառուցվածքը ավելի ամուր դարձնելու համար ամրացվեցին նաև ամրացուցիչներ:
Սկզբում ափսեը թեքվեց ցանկալի չափի մեջ ՝ տարբեր հատվածներում, այնուհետև այդ հատվածները եռակցվեցին միասին ՝ մարմինը կանգնեցնելու համար: Ավելի ամրացնողներ են ավելացվել, քանի որ հենակետի ամրացուցիչների չափերը պատկերված են նկարում
Քայլ 6. Գործարկիչի հավաքում և ափսեի պատրաստում



գործարկիչները կատարվում են v-slot համակարգերի միջոցով: Դրանք իսկապես էժան են և հեշտ կառուցման համար, կարող եք առցանց որոնել Google- ում, թե ինչպես հավաքել դրանցից մեկը: Ես բեռի կրողունակությունը բարձրացնելու համար գոտու շարժիչի փոխարեն օգտագործել եմ կապար պտուտակ: Ես չեմ ներառել հավաքման ձեռնարկը, քանի որ այն կփոխվի ըստ բեռի, որը ցանկանում եք կրել: Ինձ համար առավելագույն արագությամբ բեռը մոտ 14 կգ էր:
Ակտիվացնող ափսեը կառուցված է frp թերթի միջոցով, կարող է օգտագործվել նաև ակրիլը: Չժանգոտվող պողպատի շրջանակը կառուցվել է ՝ frp թերթին աջակցելու համար:
Թիակի շրջանակ
Թիակի շրջանակը պատրաստված է չժանգոտվող պողպատից: Չժանգոտվող պողպատը անջրանցիկ է և, հետևաբար, դիմակայելու է կոռոզիային: Թիակի շրջանակի համար օգտագործվել է 2 x 2 սմ քառակուսի հատված: Անհրաժեշտ էր ամուր շրջանակ, քանի որ ալիքների առաջացման ընթացքում շատ ցիկլային բեռներ կազդեն թիակի վրա: Պողպատե շրջանակը չի ծռվի և, հետևաբար, կստեղծի կանոնավոր սինուսոիդ ալիք:
Պատվերով L- սեղմիչ է պատրաստվել ՝ միացման շարժիչն ափսեի հետ vslot համակարգի վրա:
Քայլ 7: Ալիքի բնութագրերի մշակում



Տանկը կարող է առաջացնել ալիքի տարբեր բարձրություններ ՝ ըստ պահանջի: Ալիքի բարձրություն առաջացնելու համար շարժիչի RPM- ն ճշգրտվում է: Շարժիչի RPM- ի մեծ բարձրություն ստանալու համար այն նվազեցնում է նաև ալիքի ալիքի երկարությունը: Շարժիչի ալիքի երկարության RPM- ի ավելացումը նմանապես նվազում է: RPM- ը կարող է ճշգրտվել `ընտրացանկից ընտրելով հատուկ RPM տարբերակ:
Առավելագույն RPM = 250
Նվազագույն RPM = 50
Ստորև բերված է ալիքի տարբեր բարձրության օրինակը, որը գրանցված է արագացուցիչով: Առաջին պատկերը բարձր RPM- ով գրանցված տվյալներն են, որի արդյունքում մենք ստանում ենք ալիքի բարձրություն: Երկրորդ պատկերը ցույց է տալիս գրաֆիկի ալիքի բարձրության նվազումը և ալիքի երկարության ավելացումը, ինչը արագացուցիչի կողմից գրանցված տվյալներն են և ներկայացնում են առաջացած ալիքի իրական ալիքային բնութագրերը:
Քայլ 8. Էլեկտրոնային միացումներ և ծրագիր

Էլեկտրամատակարարումը միացնելիս զգույշ եղեք միացման բևեռայնությունը միացրեք դրական տերմինալը դրականին և բացասականին `բացասականին: Կատարեք շարժիչի և վարորդի միացումները, ինչպես ցույց է տրված նկարում: Երբ բոլոր միացումները պատշաճ կերպով միացրեք միկրոկառավարիչի կապում (8, 9, 10 և 11)) stepper motor driver- ին: USB- ով միացրեք միկրոկառավարիչը համակարգչին: Սկսեք Arduino IDE> Սերիայի մոնիտոր:
Programրագիրը ներառված է ձեռնարկում և ինքնին բացատրելի է: Այն օգտագործում է անջատիչ դեպք և հակառակ դեպքում `հայտարարություններ: Իրականում պարզ է, որ ավագ դպրոցի աշակերտը նույնպես կարող է դա հասկանալ:
Ահա ծրագրի google drive հղումը
Arduino վերահսկման ծրագիր
Քայլ 9. Գործարկիչների վերահսկում մենյուի վրա հիմնված ծրագրի միջոցով

Երբ միկրոկառավարիչը ճիշտ միացված է համակարգչին, դուք կունենաք նման ընտրացանկ: Տարբերակն ընտրելու համար պարզապես մուտքագրեք համարի կողքին գտնվող համարը և սեղմեք Enter
Օրինակ:-
Ընտրեք «Գործարկել առավելագույն հաճախականությամբ» տիպ 1 -ը և սեղմեք Enter:
Գործողությունը դադարեցնելու համար մուտքագրեք 0 և սեղմեք enter:
Վթարային կանգառ
Գործարկիչը դադարեցնելու համար սեղմեք զրո «0» և մուտքագրեք:
Արտակարգ իրավիճակների դադարեցման համար կամ սեղմեք միկրոկառավարիչի միացում կամ անջատեք սնուցման աղբյուրը:
Քայլ 10: Ինչպես գործել ալիքի բաք

Այս տանկը պատրաստվել է որպես իմ հիմնական ծրագրի մի մաս: Տանկը փորձարկվել է գլխի ծովային վիճակում տարբեր կանոնավոր ալիքների առաջացման համար ՝ մասշտաբային բեռնատար մոդելի համար: Ալիքի հոսքի փորձարկումը հաջող էր: Այս նախագծի մշակման ընդհանուր արժեքը կազմել է Rs. 81, 000 (Միայն ութսուն հազար) միայն երկու ամսվա ընթացքում:
Questionsանկացած հարցի համար խնդրում ենք մեկնաբանել:

Priրի մրցույթում առաջին մրցանակ
Խորհուրդ ենք տալիս:
Պրոֆեսիոնալ եղանակային կայան ՝ օգտագործելով ESP8266 և ESP32 DIY ՝ 9 քայլ (նկարներով)
")
ESP8266 և ESP32 DIY- ի օգտագործմամբ մասնագիտական եղանակային կայան. LineaMeteoStazione- ը ամբողջական եղանակային կայան է, որը կարող է փոխազդել Sensirion- ի պրոֆեսիոնալ սենսորների, ինչպես նաև Davis Instrument- ի որոշ բաղադրիչների հետ (Անձրևաչափ, անեմոմետր): projectրագիրը նախատեսված է որպես DIY եղանակային կայան
DIY ծրագրավորման մալուխ ՝ օգտագործելով Arduino Uno - Baofeng UV -9R Plus: 6 քայլ (նկարներով)
")
DIY ծրագրավորման մալուխ Arduino Uno-Baofeng UV-9R Plus- ի միջոցով: Ողջույն, սա պարզ ուղեցույց է այն մասին, թե ինչպես կարելի է ձեր Baofeng UV-9R (կամ գումարած) ականջակալների / ականջակալի մալուխը ծրագրավորման մալուխի վերածել Ardunio UNO- ի միջոցով որպես USB: Սերիական փոխարկիչ: [ՀՐԱՏԱՐՈԹՅՈՆ] Ես պատասխանատվություն չեմ կրում որևէ վնաս պատճառելու համար
DIY ARGB խաղային ականջակալների տակդիր ՝ օգտագործելով ակրիլ. 14 քայլ (նկարներով)
")
DIY ARGB խաղային ականջակալների տակդիր ՝ օգտագործելով ակրիլը. Բարև բոլորին, այս հրահանգով ես ձեզ ցույց կտամ, թե ինչպես պատրաստել հասցեագրված RGB հատուկ ականջակալների բազա ձեր խաղային ականջակալների համար ՝ օգտագործելով WS2812b LED (Aka Neopixels): Դրա համար կարող եք նաև օգտագործել RGB շերտեր: նախագիծը: Այդ նկարագրությունը իրական չէ
ՌԴ 433MHZ ռադիոկառավարում ՝ օգտագործելով HT12D HT12E - Rf հեռակառավարման պատրաստում ՝ օգտագործելով HT12E և HT12D ՝ 433 մՀց հաճախությամբ ՝ 5 քայլ

ՌԴ 433MHZ ռադիոկառավարում ՝ օգտագործելով HT12D HT12E | Rf հեռակառավարման սարքի պատրաստում ՝ օգտագործելով HT12E և HT12D ՝ 433 մՀց հաճախականությամբ. HT12D ապակոդավորող IC: Այս հրահանգով դուք կարող եք ուղարկել և ստանալ տվյալներ ՝ օգտագործելով շատ էժան բաղադրիչներ, ինչպիսիք են ՝ HT
DIY «Համակարգչի օգտագործման հաշվիչ ROG բազա» ՝ օգտագործելով Arduino և Python. 5 քայլ (նկարներով)
")
DIY «PC User Meter ROG Base» ՝ օգտագործելով Arduino և Python ՝ *********************************** +Նախևառաջ, այս հրահանգները գրված էին ոչ մայրենի անգլերեն խոսողի կողմից …… Ոչ անգլերենի պրոֆեսորի կողմից, ուստի խնդրում եմ տեղեկացնել որևէ քերականական սխալ մինչև ինձ ծաղրելը: p +Եվ խնդրում եմ մի ընդօրինակեք