")
Բովանդակություն:
- Քայլ 1: Դիտեք, թե ինչպես է աշխատում իմ նախագիծը
- Քայլ 2: Ստացեք ամբողջ նյութը
- Քայլ 3. loadրագիրը վերբեռնեք Arduino տախտակ
- Քայլ 4: Տեղադրեք հետքերը և կազմեք դասավորությունը
- Քայլ 5. Շրջանային սխեման միշտ օգտակար է
- Քայլ 6. Միացրեք մասնակցությունը L298N վարորդական տախտակի ելքին
- Քայլ 7. Միացրեք Power Feeder Track- ը L298N Վարորդի տախտակի մյուս ելքին
- Քայլ 8. Միացրեք L298N Վարորդի Սալիկը Arduino- ի Սալիկի Power Pins- ին
- Քայլ 9. Սենսորը միացրեք Arduino տախտակին
- Քայլ 10. Շարժիչային վարորդի մուտքային կապումներն միացրեք Arduino տախտակին
- Քայլ 11: Տեղադրեք գնացքը գծերի վրա
- Քայլ 12: Միացրեք կարգավորումը
- Քայլ 13: ԿԱՏԱՐՎԱ Է:
- Հեղինակ John Day day@howwhatproduce.com.
- Public 2024-01-30 09:46.
- Վերջին փոփոխված 2025-01-23 14:48.

Գնացքի մոդելների դասավորությունը հիանալի հոբբի է, որի ավտոմատացումը շատ ավելի լավը կդարձնի: Եկեք դիտարկենք դրա ավտոմատացման որոշ առավելություններ.
- Էժան շահագործում. Ամբողջ դասավորությունը վերահսկվում է Arduino միկրոկառավարիչի միջոցով `օգտագործելով L298N շարժիչի վարորդը, դրանց արժեքը գրեթե ոչինչ է` համեմատած գնացքների կառավարման ավանդական շնչափողերի և հոսանքի տուփերի հետ:
- Իդեալական ցուցադրման համար. Քանի որ դասավորության վրա վերահսկողություն պահպանելու համար մարդու միջամտություն չի պահանջվում, այն կարող եք օգտագործել այն ցուցադրման ժամանակ, որտեղ միշտ չէ, որ կարող եք ներկա լինել ՝ գնացքը և ելքը վերահսկելու համար:
- Հիանալի է միկրոկոնտրոլերների սիրահարների համար. Եթե դուք կամ ցանկանում եք սկսել Arduino- ով և ծրագրավորմամբ, սա հիանալի ծրագիր է ձեզ համար `ձեր հմտությունները կիրառելու համար:
Եթե հետաքրքրված եք, կարող եք նաև ստուգել այս նախագծի նախորդ տարբերակը, որն ավելի պարզ է:
Այսպիսով, առանց ավելորդ խոսակցությունների, եկեք սկսենք:
Քայլ 1: Դիտեք, թե ինչպես է աշխատում իմ նախագիծը


Քայլ 2: Ստացեք ամբողջ նյութը

Սկսելու համար համոզվեք, որ ունեք հետևյալ բոլորը.
- Նախընտրելի է Arduino միկրոկառավարիչների տախտակ, UNO:
- L298N երկակի H-Bridge շարժիչով վարորդի տախտակ:
- 6 արականից արական jumper լարեր:
- 7 արականից իգական jumper լարեր:
- Պտուտակահան:
- 12 վոլտ- DC սնուցման աղբյուրի ադապտեր:
- Հետևի հատվածում կցված IR հարևանության սենսորով ուղու հատված (ես օգտագործել եմ Kato S62 ուղի)
Քայլ 3. loadրագիրը վերբեռնեք Arduino տախտակ
Ներբեռնեք Arduino IDE- ն այստեղից, եթե այն ձեր համակարգչում չկա: Այնուհետև ներբեռնեք և բացեք տրված ֆայլը:
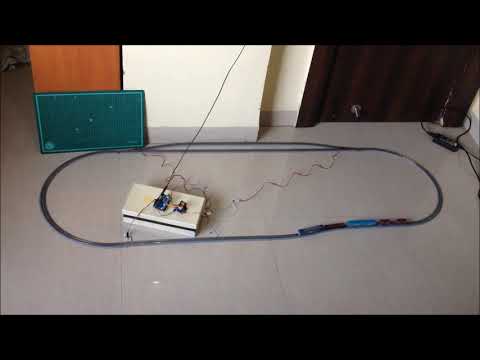
Քայլ 4: Տեղադրեք հետքերը և կազմեք դասավորությունը

Կատարեք օվալաձև օղակ ՝ անցնող երեսպատմամբ որոշ չափով, ինչպես ցույց է տրված վերևում: Համոզվեք, որ սենսորային ուղու և սենսորային գծի վրայով անցնելուց հետո գնացքի միջև եղած հեռավորությունը ավելի մեծ է, քան գնացքի երկարությունը, այնպես որ գնացքի ոչ մի հատված չի անցնում սենսորային գծի վրայով, երբ այն հատում է մասնակցությունը:
Քայլ 5. Շրջանային սխեման միշտ օգտակար է

Կտտացրեք նկարի վրա ՝ ամբողջական տեսք ստանալու համար: Շարունակելուց առաջ համոզվեք, որ անցնում եք սխեմայի ամբողջական սխեմայով և բոլոր մանրամասներով:
Քայլ 6. Միացրեք մասնակցությունը L298N վարորդական տախտակի ելքին




Միացրեք երկու մասնակցի կարմիր և սև լարերը համապատասխանաբար միմյանց, ինչը հանգեցրեց զուգահեռ կապի: Այնուհետև կարմիր լարերը միացրեք out4- ին, իսկ սև լարերը `շարժիչի վարորդի տախտակի out3 տերմինալին:
Քայլ 7. Միացրեք Power Feeder Track- ը L298N Վարորդի տախտակի մյուս ելքին


Միացրեք սնուցման սարքի սպիտակ մետաղալարը out1- ին, իսկ կապույտ մետաղալարը `շարժիչի վարորդի տախտակի արտաքին 2 տերմինալին:
Քայլ 8. Միացրեք L298N Վարորդի Սալիկը Arduino- ի Սալիկի Power Pins- ին

12 վոլտանոց կապը միացրեք Arduino- ի տախտակի VIN- ին, GND- ը `Arduino- ի տախտակի GND- ին, և ցանկալի է, որ շարժիչի վարորդի 5-վոլտանոց քորոցը Arduino- ի տախտակի 5 վոլտին:
Քայլ 9. Սենսորը միացրեք Arduino տախտակին

Սենսորի VCC կապը միացրեք Arduino տախտակի 5 վոլտ պինին, GND կապը Arduino տախտակի GND կապին, իսկ OUT կապը Arduino տախտակի A0 կապին:
Քայլ 10. Շարժիչային վարորդի մուտքային կապումներն միացրեք Arduino տախտակին

Arduino- ի տախտակի թվային կապումները միացրեք շարժիչի վարորդի տախտակի հետևյալ կերպ.
- D9- ից IN1
- D10- ից IN2
- D11- ից IN3
- D12- ից IN4
Քայլ 11: Տեղադրեք գնացքը գծերի վրա

Էլեկտրագծերի բոլոր կապերը ստուգելուց հետո գնացքը տեղադրեք սայդինգի վրա:
Քայլ 12: Միացրեք կարգավորումը

Միացրեք կարգավորումը և համոզվեք, որ մասնակցությունը միացված է կողային հատվածին, եթե ոչ, ապա պարզապես հակադարձեք շարժիչի վարորդի հետ կատարված մասնակցության միացումներին: Բացի այդ, համոզվեք, որ գնացքը սկսում է շարժվել դեպի առաջ: Հակադարձեք սնուցող ուղու կապը շարժիչի վարորդի հետ, եթե գնացքը շարժվում է սխալ ուղղությամբ:
Քայլ 13: ԿԱՏԱՐՎԱ Է:
Նախագիծն առայժմ ավարտված է: Դուք կարող եք շոշափել Arduino ծածկագիրը `դասավորության ֆունկցիոնալությունը փոխելու, ավելի շատ կողմնակի հավելումներ ավելացնելու համար: Ամեն ինչ հարմարեցված է: Ես կցանկանայի իմանալ այս նախագծում կատարված ցանկացած փոփոխության մասին: Տեղեկացրեք ինձ ստորև բերված մեկնաբանություններում: Ամենայն բարիք!
Խորհուրդ ենք տալիս:
Երկու գնացքներով աշխատող երկաթուղային ավտոմատ մոդելի դասավորություն (V2.0) - Arduino- ի հիման վրա. 15 քայլ (նկարներով)
 - Arduino- ի հիման վրա. 15 քայլ (նկարներով)")
Երկու գնացքով աշխատող երկաթգծի ավտոմատ մոդելային դասավորություն (V2.0) | Arduino- ի հիման վրա. Arduino միկրոկառավարիչների միջոցով մոդելի դասավորության ավտոմատացումը միկրոկոնտրոլերների միաձուլման, ծրագրավորման և երկաթգծի մոդելավորման մեկ հոբբիի հիանալի միջոց է: Կան մի շարք նախագծեր, որոնք վերաբերում են մոդելային երկաթուղու վրա ինքնավար գնացք վարելուն
Պարզ ավտոմատացված մոդելի երկաթգծի դասավորություն - Arduino Controlled: 11 քայլ (նկարներով)
")
Պարզ ավտոմատացված մոդելի երկաթգծի դասավորություն | Arduino միկրոկոնտրոլերները հիանալի հավելում են մոդելի երկաթուղային հաղորդակցությանը, հատկապես ավտոմատացման դեպքում: Ահա մի պարզ և հեշտ միջոց ՝ սկսելու մոդելի երկաթուղային ավտոմատացումը Arduino- ի հետ: Այսպիսով, առանց որևէ ավելորդ խոսքի, եկեք սկսենք:
Մոդելային երկաթուղային ավտոմատ թունելի լույսեր `5 քայլ

Մոդելային երկաթուղային ավտոմատ թունելի լույսեր. Սա իմ սիրած տպատախտակն է: Իմ երկաթգծի մոդելը (դեռ ընթացքի մեջ է) ունի մի շարք թունելներ և, հավանաբար, նախատիպային չէ, ես ուզում էի ունենալ թունելի լույսեր, որոնք միացված էին գնացքի թունելին մոտենալուն պես: Իմ առաջին ազդակը եղել է բ
Ավտոմատացված մոդել Երկաթգծի դասավորություն հետադարձ օղակներով. 14 քայլ

Ավտոմատացված մոդելի դասավորություն ՝ հակադարձ օղակներով. Այդ նախագծի հիմնական թերություններից մեկն այն էր, որ գնացքը պետք է շարժվեր հակառակ ուղղությամբ `ելման կետ վերադառնալու համար: Ռ
Մոդելային երկաթգծի դասավորություն ավտոմատ կողքով (V2.0). 13 քայլ (նկարներով)
. 13 քայլ (նկարներով)")
Մոդելային երկաթգծի դասավորություն `ավտոմատ կողքով (V2.0). Այս նախագիծը երկաթգծի ավտոմատացման նախորդ մոդելներից մեկի` «Երկաթուղու մոդելի դասավորությունը ավտոմատ սայդինգով» թարմացումն է: Այս տարբերակը ավելացնում է շարժակազմի հետ լոկոմոտիվի միացման և անջատման հնարավորությունը: Գործողությունը